
Arduino pilləli mühərrikləri çoxlu sarımları olan sinxron fırçasız mühərriklərdir. Stator sarımlarından birinə tətbiq olunan cərəyan rotorun kilidlənməsinə səbəb olur. Mühərrik sarımlarının ardıcıl aktivləşdirilməsi, addımlar olan rotorun diskret açısal hərəkətləri ilə nəticələnir. Buna görə mühərriklər pilləli mühərriklər adlanır. Step motorları idarə etmək üçün pilləli motor sürücüsü adlanan xüsusi bir nəzarətçi istifadə olunur.
Dəyişən maqnit müqaviməti olan bir pilləli mühərrik statorda bir neçə dirəyə malikdir və rotor qalıq maqnitləşməni saxlamayan yumşaq maqnit materialdan hazırlanır. Sadəlik üçün şəkildəki rotorun 4 dişi, statorun isə 6 dirəyi var. Mühərrikdə 3 ayrı sarım var, hər biri iki əks stator qütbünə sarılır. Şəkildəki motorun səsi 30 dərəcədir.
Bobinlərdən birinə enerji verildikdə, rotor maqnit axınının bağlandığı bir mövqe tutmağa meyllidir, yəni. rotorun dişləri enerjili sarımın olduğu qütbün əksinə olacaq. Bu sarğı bağlasanız və növbətisini açsanız, rotor mövqeyini dəyişəcək, axını yenidən dişləri ilə bağlayacaqdır. Buna görə də, davamlı fırlanma həyata keçirmək üçün fazalar növbə ilə açılmalıdır.
Bu tip mühərrik sarımlarda axan cərəyanın istiqamətinə həssas deyil və rotor maqnit olmadığı üçün bu tip mühərrik yüksək sürətlə işləyə bilir. Bu tip mühərriki digər pilləli mühərriklərdən sadəcə mili söndürməklə fərqləndirmək də asandır. Mil sərbəst dönəcək, digər növlər isə addımları aydın hiss edəcəklər.
Bəzən hər bir stator dirəyinin səthi dişli olur ki, bu da rotorun müvafiq dişləri ilə birlikdə meyl açısını bir neçə dərəcə azaldır. Dəyişən müqavimətli mühərriklər bu günlərdə praktiki olaraq istifadə edilmir.
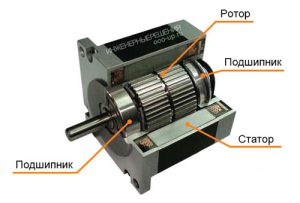
Daimi maqnit mühərriki sarma statorundan və daimi maqnitli rotordan ibarətdir. Rotorun maqnitləşməsinə görə, bu tip mühərriklər dəyişən istəksiz mühərriklərə nisbətən daha çox maqnit axını və buna görə də daha çox fırlanma momenti təmin edir.



