Индукционный двигатель что это такое?
Онлайн помощник домашнего мастера

Электродвигатели: устройство и принцип работы
Практически ни одна задача в любой области промышленности, а также в быту не обходится сегодня без применения электрического двигателя. По определению электродвигатель – это устройство, которое предназначено для преобразования энергии электрического тока во вращательное движение вала электромотора с заданными параметрами частоты, крутящего момента, допустимой нагрузки. Такое вращательное движение может использоваться как непосредственно для передачи вращения нагрузки, то есть используется прямой привод, так и подключением через редуктор, ременную передачи или другие технические решения.

В любом случае электродвигатели сегодня являются одним из самых эффективных решений в части управляемости, уровня КПД, надежности и долговечности использования. Также эл. двигатели выгодно отличает:
- точная управляемость режимом работы;
- относительная простота изготовления;
- невысокая стоимость;
- низкая периодичность обслуживания;
- возможность относительно недорогого ремонта, если сравнивать такие системы привода с двигателями внутреннего сгорания.
Именно эти особенности определяют популярность использования электромоторов разного типа и назначения:
- для решения промышленных задач;
- на электротранспорте;
- в бытовых приборах;
- в электроинструментах разного типа и назначения;
- в системах автоматики.
Краткое содержимое статьи:
Конструкция и принцип работы электродвигателя любого типа
Устройство и принцип действия любого электродвигателя достаточно просты и основаны на взаимодействии магнитных полей, которые создаются в неподвижной части электромотора или статора и в его подвижной части, размещенной на валу или ротора. Как правило, это классическая схема построения любого электромотора, хотя в технике встречаются и решения с вращающимся статором, однако сам принцип работы двигателя это не меняет.
Для создания магнитных полей, которые отталкиваются друг от другом, в результате чего приводится во вращение вал электромотора, могут использоваться:
- постоянные магниты;
- электромагниты постоянного тока;
- электромагниты переменного тока;
- электромагниты, магнитные поля в которых возникают за счет наведенных вихревых токов.
В любом случае каким бы ни был тип электродвигателя, одна система магнитных полей создается обязательно с помощью электромагнита либо обе системы полей ротора и статора создаются прохождением через их обмотки электрического тока.
В общем случае конструкция любого электромотора состоит из таких элементов:
- корпуса, который служит основой для установки статора и ротора, а также имеет элементы для крепления моторов в устройстве, элементы коммутации для подключения электропитания, ребра охлаждения и другие элементы, решающие определенное конструктивные задачи;
- магнитный или электромагнитный статор, который в большинстве промышленных решений представляет собой несколько катушек индуктивности соединенных по определенной схеме;
- вала электродвигателя, размещенного в корпусе на подшипниках разного типа;
- размещенный на валу ротора, который представляет собой систему электромагнитных катушек. В зависимости от типа электромотора она может иметь собственное электропитание, а может создавать электромагнитное поле за счет наведенных вихревых токов;
- системы подключения электропитания к ротору. При наличии такой системы питания узел подключения катушек ротора к ней, как правило представляет собой главный элемент ненадежности, требующий периодическое обслуживания. Может представлять собой систему щеточного или кольцевого типа в зависимости от типа и назначения электромотора.
Именно конструктивные особенности, а также тип питания электродвигателя определяют его основные характеристики, особенности, преимущества и недостатки и основную область применением электромотора.
Классификация электродвигателей
Сегодня в промышленной и бытовой технике используется несколько типов электромоторов, которые относятся к нескольким классам оборудования. В свою очередь двигатели классифицируют по нескольким критериям, основным из которых является тип питающего напряжения. В зависимости от питающего напряжения электродвигатели разделяют на три типа:
- постоянного тока;
- переменного тока;
- универсальные электромоторы, работающие и от постоянного, и от переменного тока.
Каждый из этих типов имеет несколько конструктивных реализаций, разделяющих большую группу электромоторов на несколько подгрупп по особенностям конструкции системы возбуждения электромагнитных полей и управления работой мотора.
Двигатели постоянного тока в свою очередь разделяются на две подгруппы:
- щеточные двигатели с разными вариантами подключения обмоток возбуждения электромагнитных полей в роторе и статоре, а также с постоянными магнитами;
- бесщеточные электромоторы постоянного тока с электронной системой управления, которая генерирует вращающееся электрическое поле заданной частоты.
Область применения двигателей постоянного тока определяется их особенностями и такими преимуществами:
- высокий коэффициент полезного действия;
- высокий крутящий момент вне зависимости от частоты вращения;
- компактные размеры по сравнению с электромоторами переменного тока равной мощности;
- простая система управления частотой и направлением вращения вала;
- возможность работы в режиме генератора в системах рекуперативного возврата электроэнергии в питающую сеть в режиме торможения.
Благодаря этим преимуществам и особенностям двигатель постоянного тока получил широкое применение для решения различных задач, связанных с:
- приводом электротранспорта разного типа;
- использованием в крановых системах;
- применением в качестве сервоприводов разного назначения;
- использованием в миниатюрных устройствах бытового и специального назначения. Как правило для этих целей используют электродвигатели с постоянными магнитами.
Наибольшее распространение в технике получили двигатели с коллектором и щетками, расположенными на роторе, которые определяют несколько основных недостатков двигателя этого типа:
- необходимость периодического обслуживания;
- значительный создаваемый шум при работе;
- возможность возникновения искр и неприятного запаха.
В зависимости от способа соединения обмоток ротора и статора в щеточных электродвигателях постоянного тока различают четыре вида коммутации обмоток, каждый из которых имеет свои преимущества, недостатки и область оптимального использования. К ним относятся:
- соединение с последовательным возбуждением электромагнитного поля;
- подключение с параллельным возбуждением;
- коммутация со смещенным возбуждением;
- использование электромотора с постоянными магнитами, как правило на статоре мотора.
Типы двигателей переменного тока
Поскольку для электроснабжения объектов используется переменное напряжения одно и трехфазного тока, наибольшее распространение получили именно двигатели переменного тока. Они широко используются как в быту, так и для решения самых разнообразных промышленных задач. По типам конструкции и принципу действия выделяют такие типы электромоторов для работы с переменным током:
- синхронные электромоторы;
- индукционные или асинхронные электродвигатели, предназначенные для работы с одно и трехфазным током;
- универсальные решения, работающие как на переменном, так и на постоянном токе.
Наибольшее распространение в промышленности получили именно индукционные асинхронные двигатели, благодаря простоте конструкции, минимальным требованиям к обслуживанию и широкому диапазону технических характеристик электродвигателей, которые позволяют решать самые разные задачи.
Главное отличие таких электромоторов от синхронных двигателей – это отсутствие необходимости подачи питания на ротор, электромагнитное поле в котором возбуждается вихревыми токами в короткозамкнутой конструкции.
До недавнего времени у таких электромоторов был один существенный недостаток – ограничение на частоту вращения ротора, связанное со стандартной частотой электропитающей сети. Также такие электромоторы без применения специальных электронных схем управления имеют такие недостатки, как:
- значительный пусковой ток;
- низкий крутящий момент на малых оборотах;
- невозможность эффективно управлять частотой вращения;
- необходимость перекоммутации обмоток для реверсивного запуска;
- сложности с запуском в цепях однофазного тока, которые решаются использованием дополнительного пускового конденсатора или использованием дополнительной пусковой обмотки.
Таких недостатков лишен электродвигатель с фазным ротором, на котором размещаются обмотки с отдельным электропитанием, подводимом через токосъемные кольца. В свою очередь это приводит к повышению сложности изготовления таких моторов, увеличению их стоимости, а также наличию элементов токосъемника, которые требуют обслуживания.
Синхронные электромоторы переменного тока также лишены перечисленных недостатков асинхронных моторов, обладают высоким крутящим моментом и постоянной скоростью вращения при изменяемым характере нагрузки, отличаются высоким КПД и небольшим реактивным сопротивлением. Однако такие электромоторы имеют и ряд существенных недостатков:
- относительная дороговизна конструкции;
- сложная схема запуска;
- наличие источника постоянного тока или выпрямителя для возбуждения электромагнитного поля;
- ряд сложностей, связанных с регулировкой частоты вращения и крутящего момента.
Поэтому в последнее время все чаще можно встретить комбинацию использования асинхронных двигателей в связке с частотными преобразователями.
Применение преобразователя частоты, позволяющего управлять частотой и амплитудой питающего напряжения значительно расширяет область применения таких моторов, повышает их экономичность и точность управления. В таких системах появляется возможность:
- запитать трехфазный двигатель даже от сети однофазного тока;
- обеспечить оптимальный режим пуска, остановки;
- управлять направлением вращения вала мотора;
- обеспечить защиту электромотора от нестабильности напряжения, пропадания напряжения на фазе, короткого замыкания, аварийного превышения нагрузки;
- значительно увеличить максимальную скорость вращения ротора по сравнению с работой при непосредственном подключении к сети переменного тока;
- обеспечить автоматизацию поддержания заданного режима работы с высокой точностью.
В любом случае, чтобы обеспечить максимальную эффективность работы электромоторов для решения определенной задачи, необходимо учесть:
- назначение электродвигателя и системы, в которой он используется;
- особенности режима эксплуатации;
- требования управляемости и автоматизации процесса;
- стоимость реализации такого решения;
- расходы на обслуживание.
Поэтому при разработке любой системы, как правило, сначала определяют технические требования к режимам работы электропривода, а затем на их основе выбирают оптимальный тип электромотора, использование которого будет рационально с точки зрения стоимости внедрения и затрат на эксплуатацию.
Учитывая многообразие решений как в области различных систем электропривода, так и в области управления работой двигателями, сделать оптимальный выбор могут только специалисты с опытом разработки и внедрения таких решений.
Поэтому, когда вам требуется спроектировать решение на основе электромотора, необходимо подобрать оптимальный тип электродвигателя и его системы управления. Наша компания занимается поставкой и внедрением систем управления работой электромоторов разного типа, назначения и мощности, поэтому вы всегда можете обратиться к нашим специалистам за помощью и консультацией в подборе решения, которое будет оптимально для вашей области применения.
Принцип работы асинхронного двигателя
Асинхронный (индукционный) двигатель (АД) – устройство, преобразовывающий электрическую энергию в механическую. «Асинхронный» означает разновременный. Электродвигатели асинхронные питаются от сети переменного тока.

Особенности асинхронных двигателей
Применение
Такие электродвигатели (частотные преобразователи) не используются в сетях постоянного тока. Но они имеют широкое применение во всех отраслях народного хозяйства. По статистике, до 70% электроэнергии, которая преобразуется в механическую энергию поступательного либо вращательного движения, потребляется именно индукционными электродвигателями.
Асинхронная машина не подключается к сети постоянного тока.
Асинхронные частотные преобразователи не требуют сложного производства и просты по своей конструкции, но в тоже время очень надежны. Такие двигатели могут работать от однофазной и трехфазной сети, используя разные частоты. Преобразователи не подходят для сетей постоянного тока. Для их управления применяют сравнительно несложные схемы.
При выборе асинхронного двигателя зачастую возникают проблемы с определением:
- его мощности;
- характеристик и приемлемой схемы, с помощью которой осуществляется управление электродвигателем;
- расчетом мощности конденсаторов, которые нужны, чтобы преобразователь работал от одной фазы;
- марки и сечения провода;
- устройств защиты и управления, которыми оснащен преобразователь.
Чтобы во всем этом разобраться, необходимо знать устройство и особенности работы асинхронного агрегата. Это поможет правильно подобрать преобразователь для решения конкретной задачи.
Индукционный агрегат свое название получил благодаря тому, что магнитное поле вращается с более высокой скоростью, чем сам ротор, поэтому последний всегда пытается «догнать» скорость вращения поля.
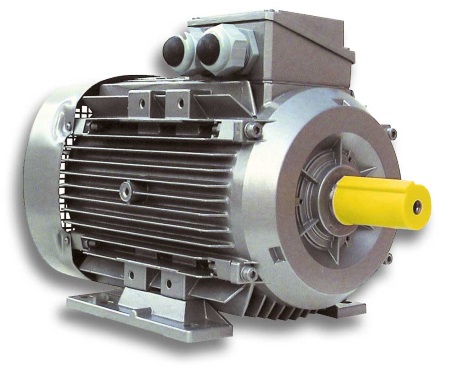
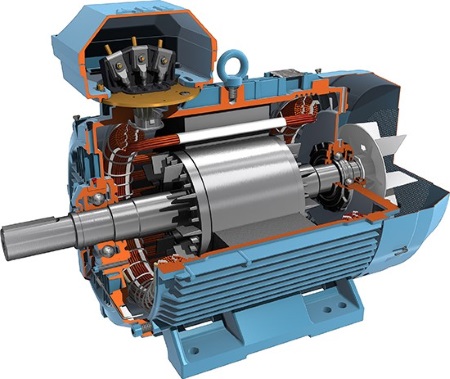
Устройство АД
Ротор и статор – главные элементы индукционного двигателя.
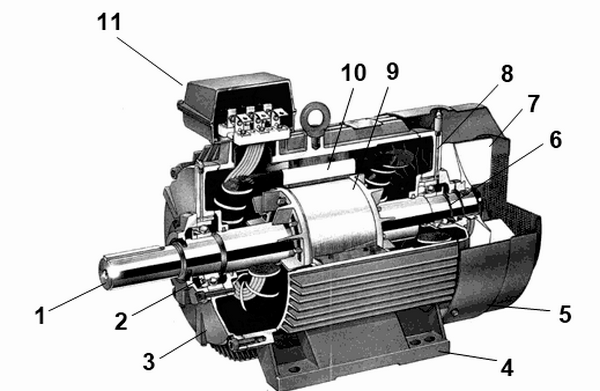
Схема устройства асинхронного агрегата
Схема: вал (1), подшипники (2,6), лапы (4), крыльчатка (7), статор (10), коробка выводов (11), ротор (9), кожух вентилятора (5), щиты подшипниковые (3,8).
На рисунке представлено устройство типового агрегата. Статор АД имеет форму цилиндра. Внутренняя часть имеет размеры, обеспечивающие зазор между ротором и статором. В пазах сердечника расположены обмотки. Их оси для нормальной работы расположены относительно одна другой под углом 1200. Между собой концы обмоток собираются с помощью схемы «звезда» либо «треугольник», но это зависит непосредственно от напряжения. Ротор может быть фазным либо короткозамкнутым.
Ротор вращается по ходу движения магнитного поля.
Трехфазную обмотку устанавливают на фазный ротор, она напоминает обмотку статора. С одной стороны концы обмотки фазного ротора обычно соединяются в «звезду», а свободные концы подсоединяются к контактным кольцам. Для включения в цепь обмотки фазного ротора дополнительного сопротивления используются щетки, подключенные к кольцам. Такая конструкция не предназначена для работы в цепях постоянного тока, так как необходимое вращение обеспечивает изменение фазы.
Короткозамкнутый ротор – это сердечник, который сделан из стальных листов. Пазы в короткозамкнутом роторе заполняются расплавленным алюминием, в результате чего получаются стержни, замыкаемые накоротко торцевыми кольцами.
Таким короткозамкнутым ротором создаются условия для минимального электрического сопротивления. Эта конструкция получила название «беличья клетка» или «беличье колесо».

Конструкция «беличья клетка»
В короткозамкнутом роторе повышенной мощности пазы заполняются медью или латунью. Беличье колесо – это и есть короткозамкнутая обмотка ротора.
В зависимости от подключаемой фазы индукционный агрегат подразделяется на однофазный и трехфазный. С помощью учета данного параметра различают принцип действия асинхронного двигателя.
Однофазная индукционная машина
Чаще всего индукционный однофазный двигатель переменного тока устанавливается в бытовой технике, так как электроснабжение дома осуществляется от однофазной электросети. Преимуществом таких двигателей переменного тока является достаточно прочная конструкция и низкая стоимость, отсутствие сложных схем управления.
Они вполне подходят для длительной работы, так как не нуждаются в техническом обслуживании. Обычно однофазный двигатель малой мощности – до 0,5 кВт. Такие электродвигатели устанавливаются в стиральных машинах, компрессорах холодильников и другой бытовой технике, где ротором создается небольшая скорость вращения, сравнительно небольшой объем силы тока.
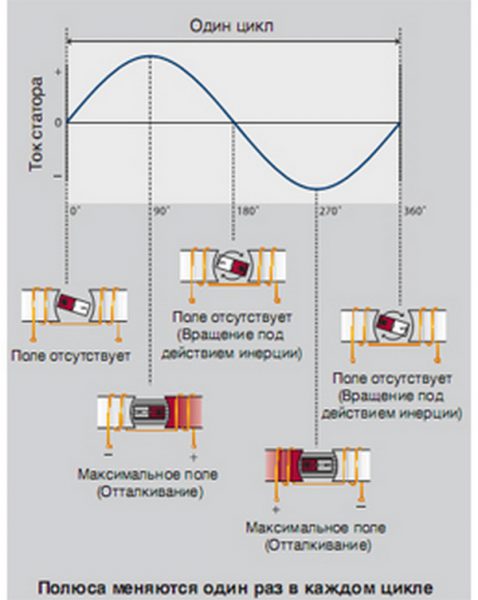
Схема работы однофазного двигателя малой мощности
В однофазных индукционных агрегатах на статоре установлено управление ротором от двух обмоток, которые сдвинуты одна от другой на 900 тока для образования пускового момента. Одна обмотка является пусковой, а вторая – рабочей.
Однофазные электродвигатели не подходят для сетей постоянного тока. Они характеризуются низкими энергопоказателями и малой перегрузочной способностью. Агрегаты функционируют в нормальном режиме, если не нарушен определенный диапазон частоты поля. После начала вращения устройство управления подключает рабочую обмотку. Это позволяет уменьшить потребление энергии.
В электрических приводах с обычным запуском устанавливаются, как правило, однофазные индукционные двигатели, имеющие экранированные полюса. В таком асинхронном электродвигателе в качестве вспомогательной фазы выступают короткозамкнутые витки, имеющие минимальные сопротивления, размещенные на выраженных полюсах статора.
Учитывая то, что пространственный угол, образованный витком и осями основной фазы, гораздо меньше 900, в таком электродвигателе есть эллиптическое поле. С помощью него создаются сравнительно небольшие силы, чем и объясняются невысокие рабочие и пусковые свойства индукционных электродвигателей, оснащенных экранированными полюсами с фазным включением.
Индукционные однофазные электродвигатели, имеющие короткозамкнутый ротор подразделяются на:
- с усиленным сопротивлением фазы пуска;
- агрегаты с короткозамкнутым ротором, оснащенные рабочим конденсатором;
- оснащенные фазным пусковым конденсатором;комбинированные с фазным управлением, короткозамкнутым ротором;
- комбинированные с фазным управлением, короткозамкнутым ротором;
- с экранированными полюсами.
Асинхронным однофазным машинам не рекомендуется работать на холостом ходу. Пренебрежение данным правилом приводит к сильному перегреву фазного двигателя.
Трехфазный двигатель
В трехфазной индукционной машине обмотка предназначена для образования вращающегося по кругу магнитного поля, которое проходит через короткозамкнутую обмотку ротора. Созданные с фазным управлением аппараты не применяются в цепях постоянного тока. При прохождении поля через проводники обмотки статора образуется электродвижущая сила, которая и вызывает прохождение переменного тока в обмотке, управляющей ротором, имеющим собственное магнитное поле. Данное магнитное поле при взаимодействии с фазным магнитным вращающимся полем статора вызывает вращение определенной частоты вслед за полями между ним и ротором.
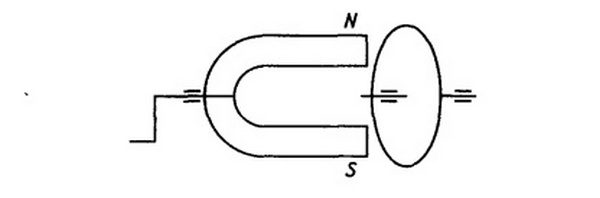
Схема работы индукционного трехфазного агрегата
Данный принцип разработал академик из Франции Араго. Иными словами, если подковообразный магнит установить вблизи металлического диска свободно закрепленным на оси и вращать его с поддержанием определенной частоты оборотов, то металлический диск без дополнительного управления начнет движение за магнитом, однако скорость его вращения будет меньше, чем скорость движения магнита.
Данное явление обусловлено правилами электромагнитной индукции. Во время вращения около поверхности металлического диска полюсов магнита в контурах под полюсом образуется электродвижущая сила соответствующей частоты, и возникают токи, создающие магнитное поле металлического диска. Магнитное поле диска начинает взаимодействовать с полем полюсов вращающегося магнита, в результате чего диск «увлекается» своим магнитным полем.
Так и в асинхронном агрегате, в качестве металлического диска выступает короткозамкнутая обмотка ротора, а в качестве магнита – магнитопровод и обмотка статора.
Чтобы облегчить управление и запуск трехфазного электродвигателя при подключении к однофазной сети (переменного, а не постоянного тока), на момент пуска дополнительно устанавливается параллельно с рабочим и пусковой конденсатор. Им компенсируют отсутствие фазы и соответствующей частоты поля.
Запуск трехфазного двигателя
Двигатель в работе. Видео
О том, как работает асинхронный двигатель в режиме генератора, можно посмотреть в этом видео. Здесь представлены дельные советы по оптимизации процесса, в том числе и те, которые относятся к схемам управления фазным вращением.
Таким образом, зная особенности работы индукционной машины, с уверенностью можно сказать, что преобразование в механическую энергию электрической происходит в результате вращения вала электродвигателя (ротора).
Скорость вращения магнитного поля ротора и статора напрямую зависит от частоты питающей сети и количества пар полюсов. В случае, когда тип двигателя ограничивает число пар полюсов, то для управления изменением частоты питающей сети в больший диапазон используют частотный преобразователь.
Выше рассмотрены особенности управления фазным вращением. Также приведены отличия конструкции с короткозамкнутым минимальным ротором, который используется для уменьшения сопротивления. Следует помнить, что устройство некоторых агрегатов подразумевает возможность их применения только в цепях постоянного тока. Преобразователи с фазным вращением работают при питании переменным током.
Устройство и принцип работы электродвигателя
Электродвигатель – устройство для преобразования электроэнергии во вращательное движение вращающейся части электрической машины. Преобразование энергии в двигателях происходит за счет взаимодействия магнитных полей обмоток статора и ротора. Эти электрические машины широко используются во всех отраслях промышленности, в качестве привода электротранспорта и инструментов, в системах автоматизации, бытовой техники и так далее.
Существует множество видов электродвигателей, различающихся по принципу действия, конструкции, исполнению и другим признакам. Рассмотрим основные типы этих электрических машин.
По принципу действия различают магнитоэлектрические и гистерезисные электрические машины. Несмотря на простоту конструкции, высокий пусковой момент, последние не получили широкого распространения. Эти электродвигатели имеют высокую цену, низкий коэффициент мощности, ограничивающие их применение. Подавляющее большинство выпускаемых электродвигателей – магнитоэлектрические.
По типу напряжения питания различают:
- Электродвигатели постоянного тока.
- Двигатели переменного тока.
- Универсальные электрические машины.
По конструкции различают электродвигатели с горизонтально и вертикально расположенным валом. Кроме того, электрические машины классифицируют по назначению, климатическому исполнению, степени защиты от попадания влаги и посторонних предметов, мощности и другим параметрам.
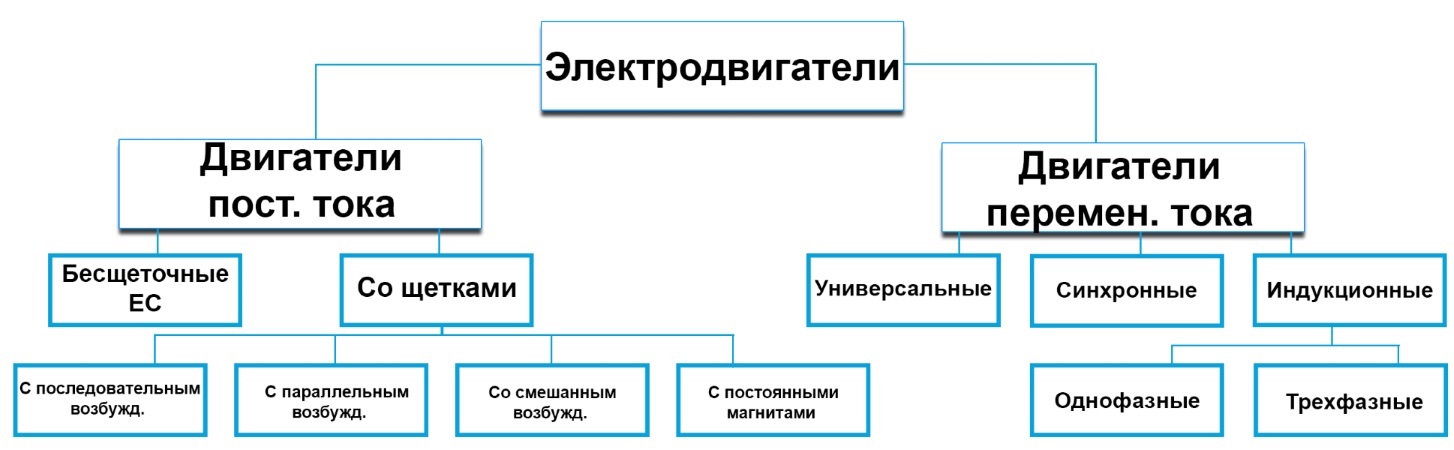
Классы электродвигателей:
- Постоянного тока
- Бесщеточные ЕС (электронно-коммутируемые)
- Со щетками
- С последовательным возбуждением
- С параллельным возбуждением
- Со смешанным возбуждением
- С постоянными магнитами
- Переменного тока
- Универсальные
- Синхронные
- Индукционные
- Однофазные
- Трехфазные
Таблица классификации электронных двигателей:
Электродвигатели постоянного тока
Двигатели постоянного тока широко применяются в качестве привода электротранспорта, промышленного оборудования, а также микропривода исполнительных механизмов. Такие электрические машины обладают следующими преимуществами:
- Возможность регулировки частоты вращения путем изменения напряжения в обмотке возбуждения. При этом крутящий момент на валу ДПТ (двигатели постоянного тока) остается неизменным.
- Высокий к.п.д. (коэффициент полезного действия) у машин постоянного тока несколько выше, чем у самых распространенных асинхронных двигателей переменного тока. При неполной нагрузке на валу к.п.д. ДПТ выше на 10-15%.
- Возможность изготовления ДПТ небольших габаритов. Практически все используемые микроприводы рассчитаны на постоянный ток.
- Простота схем управления. Для пуска, реверса и регулирования скорости и момента не требуется сложного электронного оборудования и большого количества аппаратов для коммутации.
- Возможность работы в режиме генератора. Электродвигатели такого типа можно использовать в качестве источников постоянного тока.
- Высокий пусковой момент. ДПТ используют в составе электроприводов кранов, тяговых и грузоподъемных механизмов, где требуется запуск под значительной нагрузкой.
ДПТ различают по способу возбуждения, они бывают:
- С постоянными магнитами. Такие двигатели отличаются малыми габаритами. Основная область их применения – микроприводы.
- С электромагнитным возбуждением.
Электрические машины с электромагнитами такого типа получили самое широкое распространение. Их классифицируют по способу подключения обмотки статора:
- Двигатели с параллельным возбуждением. Обмотки якоря и статора в электрической машине такого типа соединены параллельно. Такие электрические машины не требуют дополнительного источника питания для обмотки возбуждения, скорость вращения ротора практически не зависит от нагрузки. Их используют для привода металлорежущих станков и другого оборудования.
- Электродвигатели с последовательно включенной обмоткой статора. ДПТ этого типа имеют значительный пусковой момент. Их применяют в качестве привода электротранспорта и промышленных установок с необходимостью пуска под нагрузкой.
- Двигатели с независимым возбуждением. Для питания обмотки статора таких электромашин используется независимый источник постоянного тока. ДПТ такого типа отличаются широким диапазоном регулирования скоростей.
- Электрические машины со смешанным возбуждением. Электромагнит возбуждения в таких двигателях поделен на 2 части. Одна из них включена параллельно, вторая последовательно обмотке якоря. Электрические машины такого типа используются в механизмах и оборудовании, где необходим высокий пусковой момент, а также переменная и постоянная скорость при переменном моменте.
Электродвигатели переменного тока
Электрические машины такого типа широко используют для приводов всех типов технологического оборудования, электроинструментов, автоматических регуляторов. По наличию разности между скоростью вращения магнитного поля статора и частотой вращения ротора различают синхронные и асинхронные двигатели.
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.
Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.

Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Синхронные двигатели переменного тока
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода.
Универсальные двигатели
В отдельную группу выделяют универсальные электродвигатели, которые могут работать от сети переменного тока и от источников постоянного напряжения. Они используются в электроинструментах, бытовой технике, а также других маломощных устройствах. Конструкция такой электрической машины принципиально не отличатся от двигателя постоянного тока. Главное отличие – конструкция магнитной системы и обмоток ротора. Магнитная система состоит из изолированных друг от друга секций для снижения магнитных потерь. Обмотка ротора такой машины поделена на 2 части. При питании от переменного тока напряжение подается только на ее половину. Это делается в целях снижения радиопомех, улучшения условий коммутации.
К преимуществам таких машин относятся:
- Высокая скорость вращения. Универсальные электродвигатели развивают скорость до 10 000 об/мин и более.
- Питание от переменного и постоянного напряжения. Двигатели такого типа широко применяют для электроинструментов, имеющих дополнительные аккумуляторные батареи.
- Возможность регулирования скорости без использования дополнительных устройств.
Однако, такие электромашины имеют свои недостатки:
- Ограниченная мощность.
- Необходимость обслуживания коллекторного узла.
- Тяжелые условия коммутации при питании от переменного напряжения из-за наличия трансформаторной связи между обмотками.
- Электромагнитные помехи при подключении к сети переменного тока.
Каждый тип двигателя имеет свои достоинства и недостатки. Выбор электрической машины для привода любого оборудования делается исходя из условий эксплуатации, требуемой частоты вращения, экономической целесообразности, типа нагрузки и других параметров.
Большая Энциклопедия Нефти и Газа
Индукционный двигатель
В нулевую группу входят однофазные системы с трех-и двухлучевыми индукционными двигателями , а также системы с магнесинами и с ферродинамометрами. [16]
Асинхронные машины, в виде трехфазных асинхронных двигателей ( индукционные двигатели ), приобретают в: е большее значение. Причиной является простая конструкция их и главным образом все большее распространение районных станций, распределяющих электрическую энергию в форме трехфазного тока. [17]
Согласно последней формуле при прочих равных условиях электромеханическая постоянная времени индукционного двигателя тем больше, чем больше скорость холостого хода. Индукционные двигатели находят применение в системах переменного тока различной частоты: от 50 до 1 000 гц. Поскольку увеличение частоты означает увеличение скорости холостого хода, это одновременно приводит к росту электромеханической постоянной времени. Для примера можно указать, что среднее значение Тэы для индукционных двигателей на 50 гц составляет около 0 03 — 0 05 сек, а для двигателей на 400 гц — около 0 1 — 0 2 сек. [18]
В том случае, когда пуск станка может производиться включением индукционного двигателя нормальной конструкции и мощности, близкой к той, которая потребляется станком во время его работы, вопрос должен решаться в принципе в сторону отказа от главной сцепной муфты. В остальных случаях необходимо принять в расчет при сравнении варианта с муфтой и без нее удорожание двигателя ( если оно имеет место), стоимость вспомогательных устройств и аппаратуры управления, а также специфические недостатки, присущие указанным выше способам пуска. Решение в пользу сохранения муфты или отказа от нее определяется результатами технико-экономического расчета для сравниваемых вариантов. Так как главная фрикционная муфта станка является одновременно элементом, предохраняющим станок от поломок при случайном возрастании крутящего момента сныше установленной нормы, то в случае отказа от муфты обязательно должны быть предусмотрены автоматически действующие механические предохранительные устройства или электрическая аппаратура, выполняющая ту же функцию. [19]
Согласно формулам ( 3 — 33) при прочих разных условиях электромеханическая постоянная времени индукционного двигателя тем больше, чем больше скорость холостого хода. Индукционные двигатели находят применение в системах переменного тока различной частоты: от 50 до 1 000 гц. Поскольку увеличение частоты означает увеличение скорости холостого хода, это одновременно приводит к росту электромеханической постоянной времени. Для примера можно указать, что среднее значение Тэы для индукционных двигателей на 50 гц составляет около 0 05 — 0 07 сек, а для двигателей на 400 гц — около 0 2 — 0 3 сек. [20]
В системах с несущей частотой этот метод получения резонансных комплексных нулей посредством присоединения параллельных ветвей осуществляется индукционным двигателем для демодуляции, схемой из массы, пружины и демпфера для создания резонансного контура п демодулирующим индукционным датчиком. Выходной сигнал индукционного датчика вычитается из сигнала входа. Это также создает два комплексных нуля относительно частоты сигнала информации ( огибающей) или четыре комплексных нуля относительно модулированной несущей. [21]
Трансформаторы с подвижной обмоткой ( потен-циал-регуля-юры), предназначенные для более высоких напряжений, выполняются в форме индукционного двигателя с закрепленным якорем, который переставляется в зависимости от требующегося дополнительного напряжения, складывающегося последовательно с основным. [22]
В качестве двигателей для следящих систем могут быть использованы как сериесные, так и шунтовые двигатели постоянного тока, а также индукционные двигатели переменного тока . [24]
Трудно сказать, как развивались бы работы в области электричества, если бы были усовершенствованы термоэлектрические машины Зеебека, построенные за пятьдесят лет до того, как получил признание индукционный двигатель Фара-дея . Но этого не случилось, и сейчас термоэлектрические генераторы во много раз менее эффективны, чем магнитные генераторы, и только чрезмерная простота термоэлементов гарантирует возможность их практического применения в малой энергетике. В равной степени со стоимостью и технологией изготовления важную роль играют размеры и вес термоэлементов. Однако наиболее важным является их кпд, определяемый как температурами 7 и Т2, при которых работает термобатарея, так и физическими свойствами материала термоэлемента. [25]
Трудно сказать, как развивались бы работы в области электричества, если бы были усовершенствованы термоэлектрические машины Зеебека, построенные за пятьдесят лет до того, как получил признание индукционный двигатель Фара-дея . Но этого не случилось, и сейчас термоэлектрические генераторы во много раз менее эффективны, чем магнитные генераторы, и только чрезмерная простота термоэлементов гарантирует возможность их практического применения в малой энергетике. В равной степени со стоимостью и технологией изготовления важную роль играют размеры и вес термоэлементов. Однако наиболее важным является их кпд, определяемый как температурами Тг и 7, при которых работает термобатарея, так и физическими свойствами материала термоэлемента. [26]
Согласно последней формуле при прочих равных условиях электромеханическая постоянная времени индукционного двигателя тем больше, чем больше скорость холостого хода. Индукционные двигатели находят применение в системах переменного тока различной частоты: от 50 до 1 000 гц. Поскольку увеличение частоты означает увеличение скорости холостого хода, это одновременно приводит к росту электромеханической постоянной времени. Для примера можно указать, что среднее значение Тэы для индукционных двигателей на 50 гц составляет около 0 03 — 0 05 сек, а для двигателей на 400 гц — около 0 1 — 0 2 сек. [27]
Согласно формулам ( 3 — 33) при прочих разных условиях электромеханическая постоянная времени индукционного двигателя тем больше, чем больше скорость холостого хода. Индукционные двигатели находят применение в системах переменного тока различной частоты: от 50 до 1 000 гц. Поскольку увеличение частоты означает увеличение скорости холостого хода, это одновременно приводит к росту электромеханической постоянной времени. Для примера можно указать, что среднее значение Тэы для индукционных двигателей на 50 гц составляет около 0 05 — 0 07 сек, а для двигателей на 400 гц — около 0 2 — 0 3 сек. [28]
Сложнее дело обстоит в случае регулируемых приводов. Индукционный двигатель трехфазного тока сам по себе следует считать практически почти нерегулируемым. Однофазные репульсионные двигатели, конкурирующие при малых мощностях с трехфазными коллекторными, в силу худшего использования материала постепенно вытесняются трехфазными. Подобно тому как это имело место в области электрической тяги, в ряде промышленных установок происходит борьба между постоянным и переменным током у регулируемых приводов. В случае единичных регулируемых установок порядка нескольких сот kW, например нереверсивные прокатные станы, шахтные вентиляторы, регулируемые воздуходувки, когда пределы регулировки не превышают 1: 2, применяются каскадные агрегаты в виде сист. Установки трехфазных коллекторных двигателей большой мощности ( 300 — 400 kW) чрезвычайно редки. Реверсивные прокатные станы ( номинальной мощностью в 2 000 — 5 000 kW), требующие регулировки в широких пределах ( до 200 — 300 %) номинальной скорости, приводятся исключительно двигателями постоянного тока, питаемыми от трехфазной сети по сист. В случае нескольких регулируемых установок большой и средней мощности, расположенных вместе, применяются теперь двигатели постоянного тока ( напр, бумагоделательные машины, прокатные металлургич. При пределах регулировки больше чем 1: 3, для регулирования широко применяется система Леонарда; она же используется в таких случаях и для пуска в ход. США и Франции применяется постоянный ток; этот род тока принят и в СССР для вновь строящихся металлургич. В Германии эк е динамостроительные з-ды усиленно пропагандируют внедрение в эту область индукционных двигателей. Коллекторные двигатели переменного тока, для таких тяжелых условий работы непригодны. [29]
Известным недостатком двигателей переменного тока является их сравнительно большой вес, в 2 — 3 раза превышающий вес двигателей постоянного тока той же мощности. Однако высокая надежность индукционных двигателей ( отсутствие щеток, требующих осмотра я смены) во многих случаях компенсируют указанный недостаток. [30]
Индукционный двигатель что это такое?
Еще в 1990-х годах все электромобили, кроме одного, были оснащены бесщеточными дисками постоянного тока. Сегодня все гибриды питаются от бесщеточных приводов постоянного тока, без каких-либо исключений. Единственным заметным применением индукционных приводов были General Motors EV-1; Транспортные средства переменного тока, включая tzero; И родстер Тесла.
Оба бесщеточных и индукционных привода постоянного тока используют двигатели с аналогичными статорами. Оба привода используют трехфазные модулирующие инверторы. Единственными отличиями являются роторы и элементы управления инвертором. И с цифровыми контроллерами единственными контрольными отличиями являются управляющий код. (Бесщеточные приводы постоянного тока требуют датчика абсолютного положения, в то время как для индукционных приводов требуется только датчик скорости, эти различия относительно малы).
Одно из главных отличий заключается в том, что при использовании бесщеточного привода постоянного тока генерируется гораздо меньше тепла ротора. Охлаждение ротора проще и эффективность пиковой нагрузки, как правило, выше для этого привода. Бесщеточный привод постоянного тока также может работать при единичном коэффициенте мощности, тогда как лучший коэффициент мощности для индукционного привода составляет около 85 процентов. Это означает, что эффективность энергии пиковой нагрузки для бесщеточного привода постоянного тока обычно будет на несколько процентных пунктов выше, чем для индукционного привода.
В идеальном бесщеточном приводе сила магнитного поля, создаваемого постоянными магнитами, была бы регулируемой. Когда требуется максимальный крутящий момент, особенно на низких скоростях, напряженность магнитного поля (B) должна быть максимальной — так, чтобы инвертор и токи двигателя поддерживались на своих минимально возможных значениях. Это минимизирует потери I ² R (сопротивление по току ² ) и тем самым оптимизирует эффективность. Аналогично, когда уровни крутящего момента являются низкими, поле B должно быть уменьшено, так что уменьшаются потери на вихревые и гистерезисы из-за B. В идеале B должен быть отрегулирован таким образом, чтобы сумма потерь вихревого, гистерезиса и I ² была минимизирована. К сожалению, нет простого способа изменения B с постоянными магнитами.
Напротив, индукционные машины не имеют магнитов, а поля B «настраиваются», поскольку B пропорциональна V / f (напряжение до частоты). Это означает, что при малых нагрузках инвертор может уменьшить напряжение, так что магнитные потери уменьшаются, а эффективность максимизируется. Таким образом, индукционная машина, работающая с интеллектуальным инвертором, имеет преимущество перед бесщеточной машиной постоянного тока — можно торговать магнитными и проводимыми потерями, чтобы оптимизировать эффективность. Это преимущество становится все более важным, поскольку производительность увеличивается. При бесщеточном использовании DC, когда размер машины растет, магнитные потери увеличиваются пропорционально, а эффективность частичной загрузки снижается. С индукцией, когда размер машины растет, потери не обязательно растут. Таким образом, индукционные приводы могут быть предпочтительным подходом, когда требуется высокая производительность; Пиковая эффективность будет немного меньше, чем при бесщеточном использовании DC, но средняя эффективность может быть лучше.
Постоянные магниты стоят дорого — примерно 50 долларов за килограмм. Роторы постоянных магнитов (PM) также трудно обрабатывать из-за очень больших сил, которые вступают в игру, когда что-либо ферромагнитное приближается к ним. Это означает, что асинхронные двигатели, скорее всего, сохранят преимущество в цене по сравнению с машинами PM. Кроме того, из-за возможностей ослабления поля индукционных машин, рейтинги и затраты на инверторы оказываются ниже, особенно для высокопроизводительных приводов. Поскольку спиннирующие индукционные машины производят мало или вообще не имеют напряжения, когда они не возбуждаются, их легче защитить.
Я почти забыл: индукционные машины сложнее контролировать. Законы контроля более сложны и трудны для понимания. Усиление стабильности по всему диапазону крутящего момента и более высокой температуре является более сложным с индукцией, чем с бесщеточным бесщеточным. Это означает дополнительные затраты на разработку, но, вероятно, мало или вообще не требует повторных затрат.
