Как сделать частотный преобразователь своими руками?
Как сделать частотный преобразователь своими руками?
Автор: DC-AC, k-d-n-electronics@yandex.ru
Опубликовано 29.07.2014
Создано при помощи КотоРед.
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
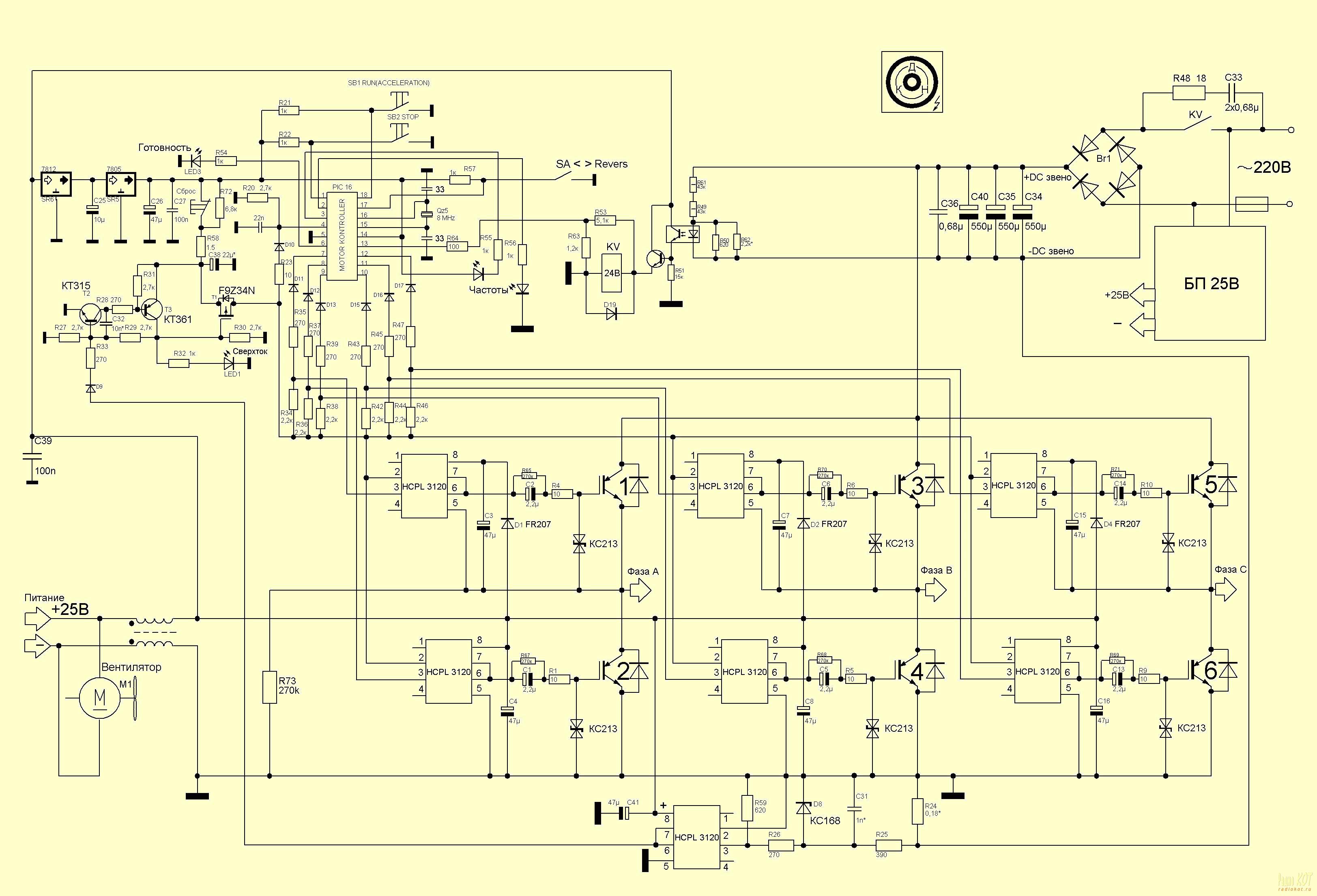
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:
Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:

С другой стороны

Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.

Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
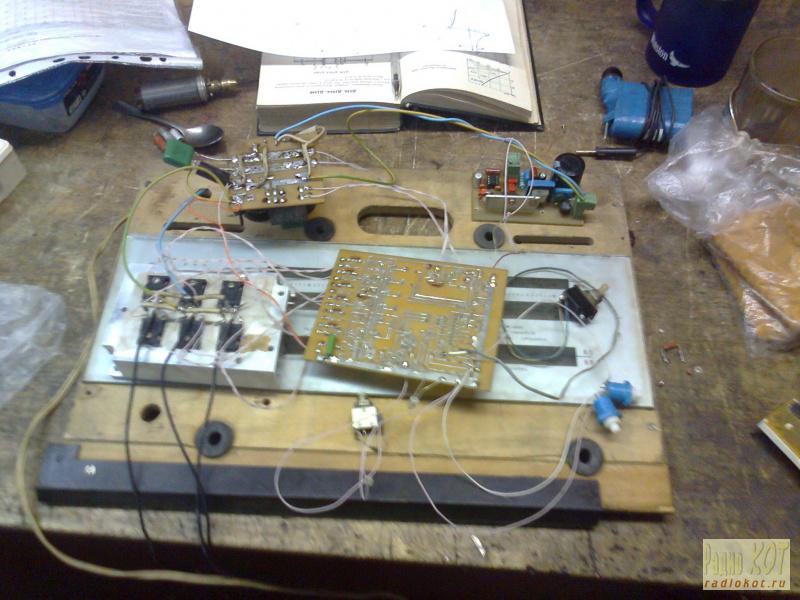
Теперь о самом главном. о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор. Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела «экспериментальная установка»:
Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала. а тут снизу та самая простая версия которая работает на пиле уже около года.
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) — 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод «готовность» сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
Частотник своими руками — любительская схема преобразователя
-
10 commentsПринцип работы 27 января, 2020

Зачем нужно делать самому преобразователь для 3-фазного электромотора, и как смастерить его своими руками? Чтобы защитить окружающую природу повсюду создаются правила, которые рекомендуют изготовителям электрических устройств делать продукцию, которая будет экономить электрическую энергию. Часто это бывает достигнуто правильным управлением частотой вращения электромотора. Преобразователь частоты легко решает эту задачу.
Частотник электромотора с тремя фазами по-разному называют: инвертор, частотный изменитель тока, приводной механизм, регулируемый частотой. Сегодня такие устройства делают разные заводы, но многие умельцы своими руками изготавливают не хуже.
Как я сам изготовил частотный преобразователь
Я изготовил преобразователь частоты и асинхронный привод для моего товарища. Ему нужен был привод для пилорамы, мощный и хороший. Так как я любил заниматься электроникой, то сразу предложил ему такую схему:
Трехфазный мост на транзисторах с диодами обратной связи я использовал, которые имелись. Управление осуществил через оптодрайвер HCPL 3120 микроконтроллером PIC16F628A. У входа припаял гасящую емкость, чтобы электролиты заряжались плавно. Затем припаял шунтовое реле. Еще установил триггер защиты тока от замыкания и перегрузки. Для управления установил две кнопки и выключатель для обратного вращения.
Силовую часть я собрал на навесном монтаже.
Резисторы, соединил параллельно по 270 кОм с помощью затворных проходных конденсаторов, позади платы их напаял. Моя плата показана на внешнем виде:

Вид этой моей платы с другой стороны:

Для подключения питающего напряжения я собрал блок питания, работающий на импульсах, обратноходовой. Вот привожу схему этого блока питания:

Как я запрограммировал микроконтроллер? Простые моргалки для меня не представляли какой-то проблемы. Получились константы в виде матрицы, над которой работал мой контроллер. Частота и напряжение были заданы этими величинами. Всю схему работы проверил на моторчике вентилятора небольшой мощности, 200 Вт. Эта моя конструкция выглядела так:

Начальные эксперименты дали хороший результат. Затем доработал программу. Раскрутил двигатель на 4 кВт, и пошел собирать управление пилорамой.
При монтаже у нас с товарищем случайно произошло замыкание и сработала защита, проверили ее работу. Мотор на 2 кВт 1500 оборотов с легкостью пилил доски. Сейчас программа еще дорабатывается для раскрутки двигателя выше номинала. Характеристики: частота от 2 до 50 герц с шагом 1,5 герц, синхронная частота, постоянно меняется, разбег от 1500 до 3500 герц, управление скалярного типа U/F, мощность мотора до 5 кВт.
Удерживаем кнопку RUN и разгоняем двигатель. Отпускаем, частота держится на уровне. Когда загорается светодиод, то привод готов к запуску.
Как сделать инвертор самому своими руками?
Вместе с производством заводских инверторов любители делают их сами, своими руками. Здесь нет ничего сложного. Такой преобразователь частоты преобразовывает одну фазу, делает из нее три фазы. Электродвигатель с похожим частотником используют в домашних условиях, мощность его не будет теряться.

Блок выпрямления в схеме расположен в начале. Далее идут фильтры, которые отсекают токовые переменные. Чтобы изготовить данные инверторы применяют транзисторы IGBT.
За тиристорами стоит будущее, хотя и в настоящем они уже применяются давно. Купленный частотник на биполярных транзисторах стоит дорого и мало где применяется (сервоприводы, металлорежущие станки с векторным управлением). Эти приводы как транспортеры и конвейеры, карусельные станки, станции подкачки воды, климатические системы управления — это большая часть от всего применения устройств заводов, где лучше использовать частотники для управления электромоторами с короткозамкнутыми якорями и можно делать управление оборотами двигателя, если подать потенциал, изменяя частоту до 50 герц.
Приведем простые примеры частотных преобразователей, которые тянули мощные электродвигатели тепловозов и электричек, имеющих в своем составе много вагонов товарных платформ, большие станции с насосами напряжением 600 вольт, обеспечивающие городские районы питьевой водой. Очевидно, что данные сильные электродвигатели не подойдут на биполярных транзисторах. Поэтому применяют активные тиристоры типа GTO, GCT, IGCT и SGCT. Они преобразуют из постоянного тока токовую сеть с тремя фазами с хорошей мощностью. Однако, имеются простые схемы на тиристорах простого типа, закрывающиеся током катода обратного. Такие тиристоры не будут действовать в режиме ШИМ, их хорошо применяют в прямой регулировке электромоторов, без тока постоянного размера. Преобразователи частоты на тиристорах в застойные времена были задействованы для моторов на постоянном токе. Фирма Сименс изобрела векторные частотники, преобразившие промышленность до неузнаваемости.
Стоимость всех деталей самодельного инвертора существенно ниже цены заводского устройства.
Такие самодельные устройства хорошо подходят для электромоторов мощностью до 0,75 кВт.
Для чего предназначен инвертор — его принцип действия
Инвертор действует на частоту вращения асинхронных моторов. Моторы переделывают электроэнергию в механическое движение. Вращательное движение преобразуется в движения механические. Это создает большое удобство. Асинхронные моторы очень популярны во многих сторонах жизни людей.
Обороты электродвигателя можно изменять и другими устройствами. Но, у них много недостатков. Они сложны в пользовании, дорого стоят, работают с плохим качеством, разбег регулировки маленький.
Частотный преобразователь для мотора с тремя фазами легко решает эту проблему. Все знают, что пользование частотниками для изменения частоты вращения есть самый хороший и правильный метод. Такой аппарат дает мягкий пуск и торможение, а также контролирует многие процессы, происходящие в моторе. Аварийные ситуации при этом сводятся на нет.

Чтобы плавно и быстро регулировать работу двигателя, специалисты разработали специальную электрическую схему. Использование в работе частотника дает возможность работать двигателю без перерыва, экономично. Коэффициент полезного действия его достигает 98%. Это происходит за счет повышения частоты коммутации. Механические устройства не могут выполнить такие функции.
Как регулировать скорость инвертором?
Как частотник может изменять частоту вращения трехфазного электромотора? Сначала он меняет напряжение сетевое. Далее, из него получается нужная амплитуда и частота напряжения, поступает на электромотор.
Разбег интервала регулирования скорости преобразователем большой. Можно изменять вращение мотора в другую сторону. Чтобы двигатель не вышел из строя, нужно брать во внимание данные из его характеристики, допускаемые обороты, мощность.
Из чего состоит привод регулирования?

Он имеет в составе три звена:
- выпрямитель, дающий потенциал постоянного тока при включении к питанию электрической сети. Сеть может быть управляемой или нет;
- фильтрующий элемент, который сглаживает выходное напряжение (применяется емкость);
- инвертор, который производит нужную частоту потенциала, крайнего звена возле электромотора.
Режим управления частотников
Их делят на виды управления оборотами двигателя:
- скалярное управление (нет связи с обратной стороны);
- режим векторного управления (связь с обратной стороны имеется, или отсутствует).
В первом случае управляется статор с его магнитным полем. Управление вектором учитывает действие полей магнита ротора и статора, улучшается крутящий момент при разных скоростях вращения. Это и есть основное различие их режимов управления.
Способ векторов точнее и эффективнее. Обслуживать его дороже. Он больше подходит для специалистов с хорошими профессиональными умениями и знаниями. Метод управления скалярного типа наиболее прост в работе. Применяется он с выходными параметрами, не требующими регулировки особой точности.
Как подключить инвертор треугольником и звездой?
Когда мы купили инвертор по недорогой цене, то возникает необходимость: подключение его к электромотору самому без специалистов. Сначала надо установить для безопасности автоматический выключатель для обесточивания. Если возникнет короткое замыкание на фазах, то отключится вся система.
Подключить частотник к мотору можно звездой или треугольником.

Когда привод регулирования с одной фазой, то контакты электромотора присоединяют треугольником. Тогда мощность не потеряется. Мощность этого преобразователя частоты будет не более 3 кВт.
Инверторы с тремя фазами технически наиболее современны. Они питаются от заводских трехфазных сетей, подключаются звездой.
Для ограничения тока пуска и уменьшения момента пуска при пуске электромотора свыше 5 кВт можно использовать способ включения треугольник и звезда.
При включении статора применяется схема звезды, а если обороты двигателя нормальные, то переходят на вариант треугольника. Но это используется при существовании возможности соединения по двум схемам.
Отмечаем, что в варианте звезда-треугольник большие перепады тока будут всегда. При переключении на вторую схему обороты двигателя сильно снизятся. Для восстановления скорости вращения надо повысить силу тока.
Большой применяемостью оказывают пользу частотники для моторов мощностью до 8 кВт.
Применение инверторов нового поколения
Современные частотные преобразователи делаются с применением таких устройств как микроконтроллеры. Это значительно повышает функции инверторов в алгоритмах управления и контролирования с точки зрения безопасности работ.
Частотники имеют успешное применение в областях производства:
- в водоснабжении, снабжении теплом при изменении скорости подачи помпы холодного и горячего водоснабжения;
- в заводских условиях машиностроения;
- в легкой и текстильной промышленности;
- в энергетике и производстве топлива;
- для насосов канализации и скважин;
- в технологических процессах для автоматики управления.
Чтобы управлять и контролировать частотники изготовитель прибора предлагает созданную программу, которая будет всегда иметь связь с контроллером посредством порта, будет показывать на мониторе состояние и позволит производить управление. Данные документируются протоколом обмена и используются пользователями, создающими программы управления для электронной техники и контроллеров.
Данные обмениваются в три этапа:
- Идентификация.
- Инициализация.
- Управление и контроль.
Стоимость блоков питания бесперебойного напряжения имеет зависимость от того, есть ли в нем частотный преобразователь. За такими устройствами будущее. Отрасли экономики и энергетики будут быстрее развиваться благодаря новым современным устройствам.
Частотный преобразователь своими руками
Частотный преобразователь своими руками

Частотный преобразователь своими руками — представляю вам небольшую статью о асинхронном двигателе и частотном преобразователе, который мне ранее приходилось делать. Вот и теперь потребовался хороший привод для циркулярной пилы. Конечно можно было бы взять в магазине фирменный частотник, но все-таки вариант самостоятельного изготовления оказался для меня наиболее приемлемым.
К тому же, качество регулировки скорости привода пилорамы не требовало абсолютной точности. Однако с нагрузками ударного типа и длительными перегрузками он должен справляться. К тому же хотелось сделать управление наиболее простым, без всяких там параметров, а просто установить пару кнопок.
Главные преимущества привода с регулировкой частоты:
- Создаем из однофазного напряжения 220v полновесные три фазы 220v, сдвиг у которых будет 120°, при этом получаем абсолютный вращательный момент с мощностью на валу
- Повышенный момент старта с плавным запуском без максимального пускового тока
- Нет сильного замагничивания и излишнего перегрева мотора, как это бывает когда применяются конденсаторы
- При необходимости можно свободно управлять скоростью вращения и менять направление
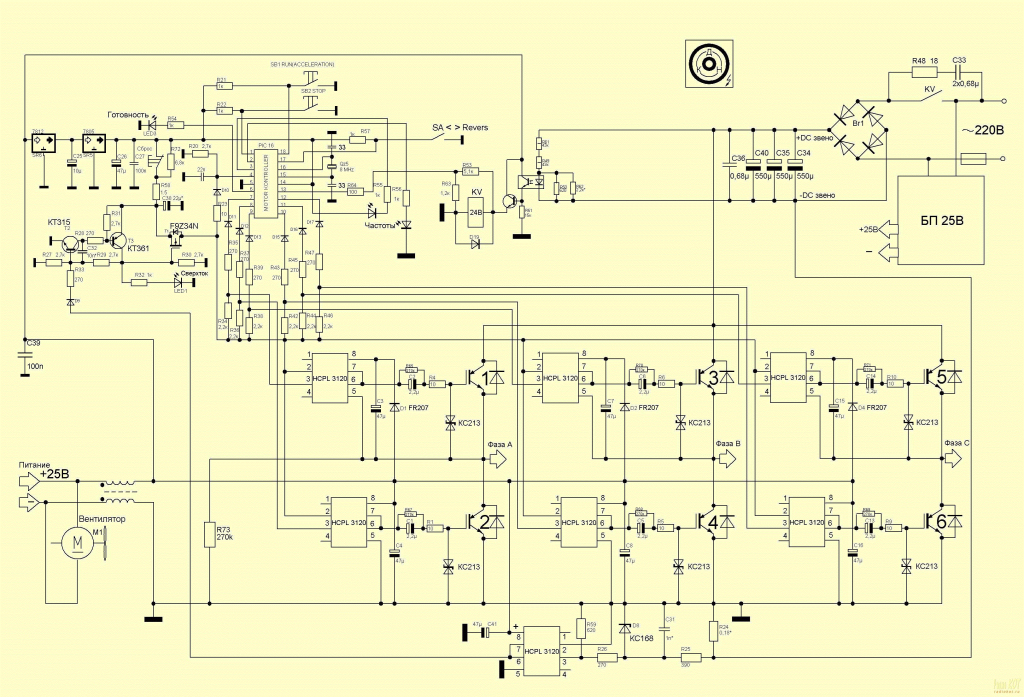
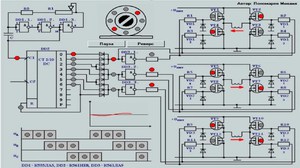
Ниже показана принципиальная схема устройства:

Трехфазный мост выполнен на гибридных IGBT транзисторах c диодами обратной проводимости. В целом это представляет собой бустрепное управление микроконтроллером PIC16F628A, осуществляемое с помощью специализированных оптодрайверов HCPL-3120. Во входном тракте установлен конденсатор гашения напряжения, выполняющего функцию мягкой зарядки электролитических конденсаторов в цепи постоянного напряжения.
Быстродействующая защита
Далее по схеме он зашунтирован электромагнитным реле, при этом на PIC16F628A подается цифровой логический уровень готовности. В схеме предусмотрена быстродействующая защита по току от короткого замыкания и критической перегрузке мотора, выполненная по триггерной схеме. Все это управляется при помощи двух кнопок и одного переключателя, который изменяет направление вращения вала.
Частотный преобразователь своими руками, в частности участок силовых напряжений был собран методом навесного монтажа, а контроллер размещен на печатной плате, которая показана ниже:

Постоянные резисторы с номиналом 270к, шунтирующие конденсаторы установленные в цепи затвора IGBT, запаял со стороны дорожек, так как упустил из виду сделать для них площадки. Их конечно можно заменить на smd.
Здесь показано фото печатной платы контроллера после распайки компонентов:

А это с противоположной стороны

Для подачи напряжения питания в модуль управления был изготовлен стандартный обратноходовой импульсный источник питания.
Принципиальная схема блока питания:

Чтобы изготовить частотный преобразователь своими руками в принципе можно использовать практически любой источник питания с выходным напряжением 24v. Однако, этот блок питания должен быть стабилизированный и с задержкой напряжения на выходе с момента исчезновения напряжения сети, хотябы в пределах 3-х секунд. Это обусловлено тем, что двигатель смог отключится в случае возникновения ошибки по DC. Достигается подбором электролитического конденсатора С1 с большим значением емкости.
Ну, а теперь нужно подробнее разобраться в самом важном компоненте данного устройства — в программе микроконтроллера. В интернете подходящей для меня информации по этому вопросу я не нашел, хотя были предложения установить специальные фирменные контроллеры. Но как я уже говорил, мне принципиально нужно было установить, что-то собственной разработки. Приступил во всех подробностях анализировать ШИМ модуляцию, в какое время и каким способом открыть определенный транзистор…
Программа формирования задержек
Выяснились некоторые закономерности и получился образец несложной программы формирования задержек. При ее использовании получается произвести достаточно хорошую синусоидальную ШИМ с возможностью изменять напряжение. Естественно контроллер делать какие либо вычисления не успевал, задержки не давали того эффекта, который был нужен. Следовательно, такой вариант обсчитывания ШИМ на микроконтроллере PIC16F628A я забраковал сразу.
В результате образовалась констант матрица, а ее уже отрабатывал PIC16F628A. Они формировали и диапазон частоты и напряжение питания. Конечно эта работа по созданию данного устройства несколько затянулась. Циркуляркой уже полным ходом пилили на конденсаторах, когда появился необходимый вариант прошивки. Первоначально тестировал схему на моторе от вентилятора, мощностью 180 Вт. Вот фото прибора на стадии экспериментальных работ:

Тестирование устройства
Чуть позже, в процессе испытания программа подвергалась усовершенствованию, а после запуска двигателя мощностью на 4 кВт я практически был удовлетворен итогом своей работы. Защита от короткого замыкания прекрасно срабатывает, полутора-киловаттный мотор на 1440об/мин с диском 300мм свободно справлялся с приличными брусками. Шкивы были установлены одинаковые, что на двигатель, что на вал циркулярки. При попадании пилы на сучок сетевое напряжение немного падало, хотя двигатель продолжал работать.
По ходу работы потребовалось немного натянуть ремень, поскольку при увеличении нагрузки он начинал скользить на шкиве. В дальнейшем применили двойную передачу. Но на этом решил не останавливаться, поэтому сейчас начал усовершенствовать программу, в итоге она будет значительно эффективней. Принцип работы ШИМ-контролера немного усложняется, появится больше режимов, появится ресурс раскручивания выше номинального значения.
В конце статьи файлы для того самого простого варианта устройства, которое прекрасно работает с циркулярной пилой уже больше года.
Характеристики:
- Частота на выходе: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ-контроллера синхронная, с возможностью изменения. Диапазон частот в пределах 1750-3350Гц.; Скалярное управление частотным преобразователем, мощность мотора около 4кВт. Самая меньшая частота работы при разовом нажатии кнопки «Пуск» — составляет 10Гц.
- Во время удержании кнопки нажатой появляется разгоняющий момент, а когда кнопка отпускается, то частота буде той, до какой смог разогнаться. Частота по максимуму — 50Гц информирует светодиодный индикатор. Номинальное время разгоняющего момента составляет 2 секунды.
- Индикатор «Готов» сообщает о готовности устройства к старту двигателя.
Частотник для трехфазного электродвигателя своими руками
 Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Сегодня асинхронные двигатели являются основными тяговыми приводами для станков, конвейеров, и прочих промышленных агрегатов.
Для того чтобы моторы могли нормально функционировать, им нужен частотный преобразователь. Он позволяет оптимизировать работу агрегата и продлить срок его службы. Покупать устройство необязательно — частотник для трехфазного электродвигателя можно сделать своими руками.
- Назначение частотного преобразователя
- Принцип работы устройства
- Самостоятельное изготовление прибора
- Делаем трехфазный преобразователь
- Частотник для однофазного двигателя
- Возможные проблемы при проверке
Назначение частотного преобразователя
 Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Асинхронный электродвигатель может работать и без частотника, но в этом случае у него будет постоянная скорость без возможности регулировки. К тому же отсутствие частотного преобразователя приведет к возрастанию пускового тока в 5−7 раз от номинального, что вызовет увеличение ударных нагрузок, повысит потери электроэнергии и приведет к существенному сокращению срока службы агрегата.
Для нивелирования всех вышеперечисленных негативных факторов были изобретены преобразователи частоты для асинхронных двигателей трехфазного и однофазного тока.
Частотник дает возможность в широких пределах регулировать скорость электродвигателя, обеспечивает плавный пуск, позволяет регулировать как скорость запуска, так и скорость торможения, подключать трехфазный мотор к однофазной сети и многое другое. Все эти функции зависят от микроконтроллера, на котором он построен, и могут отличаться у разных моделей.
Принцип работы устройства
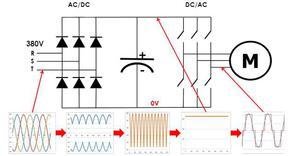
 Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Переменный ток поступает из сети на диодный мост, где он выпрямляется и попадает на батарею сглаживающих конденсаторов, где окончательно превращается в постоянный ток, который поступает на стоки мощных IGBT транзисторов, управляемых главным контроллером. Истоки транзисторов, в свою очередь, подключены к двигателю.
Вот упрощенная схема преобразователя частоты для трехфазного асинхронного двигателя.
Теперь рассмотрим, что происходит с транзисторами и как они работают.
Полевой транзистор (он же ключ, мосфет и пр.) — это электронный выключатель, принцип его действия основан на возникновении проводимости между двумя выводами (сток и исток) мосфета, при появлении на управляющем выводе (затворе) напряжения, превышающего напряжение стока.
В отличие от обычных реле, ключи работают на очень высоких частотах (от нескольких герц до сотен килогерц) так что заменить их на реле не получится.
 С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
С помощью этих быстродействующих переключателей микроконтроллер получает возможность управления силовыми цепями.
К контроллеру, кроме мосфетов, также подключены датчики тока, органы управления частотником, и другая периферия.
При работе частотного преобразователя микроконтроллер измеряет потребляемую мощность и, в соответствии с установленными на панели управления параметрами, изменяет длительность и частоту периодов, когда транзистор открыт (включен) или закрыт (выключен), тем самым изменяя или поддерживая скорость вращения электродвигателя.
Самостоятельное изготовление прибора
Несмотря на множество агрегатов заводского производства, люди делают преобразователи частоты самостоятельно, благо на сегодняшний день все его компоненты можно купить в любом радиомагазине или заказать из Китая. Такой частотник обойдется вам значительно дешевле покупного, к тому же вы не будете сомневаться в качестве его сборки и надежности.
Делаем трехфазный преобразователь
 Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собирать наш преобразователь будем на мосфетах G4PH50UD, которыми будет управлять контроллер PIC16F628A посредством оптодрайверов HCPL3120.
Собранный частотник при подключении в однофазную сеть 220 В будет иметь на выходе три полноценные фазы 220 В, со сдвигом 120°, и мощность 3 КВт.
Схема частотника выглядит так:
Так как частотный преобразователь состоит из частей, работающих как на высоком (силовая часть), так и на низком (управление) напряжении, то логично будет разбить его на три платы (основная плата, плата управления, и низковольтный блок питания для неё) для исключения возможности пробоя между дорожками с высоким и низким напряжением и выхода устройства из строя.
Вот так выглядит разводка платы управления:
Для питания платы управления можно использовать любой блок питания на 24 В, с пульсациями не более 1 В в размахе, с задержкой прекращения подачи питания на 2−3 секунды с момента исчезновения питающего напряжения 220 В.
Блок питания можно собрать и самим по этой схеме:
Обратите внимание, что номиналы и названия всех радиокомпонентов на схемах уже подписаны, так что собрать по ним работающее устройство может даже начинающий радиолюбитель.
Перед тем как приступить к сборке преобразователя, убедитесь:
 В наличии у вас всех необходимых компонентов;
В наличии у вас всех необходимых компонентов;- В правильности разводки платы;
- В наличии всех нужных отверстий для установки радиодеталей на плате;
- В том, что не забыли залить в микроконтроллер прошивку из этого архива:
Если вы все сделали правильно и ничего не забыли, можете приступать к сборке.
После сборки у вас получится что-то похожее:
 Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Теперь вам осталось проверить устройство: для этого подключаем двигатель к частотнику и подаем на него напряжение. После того как загорится светодиод, сигнализирующий о готовности, нажмите на кнопку «Пуск». Двигатель должен начать медленно вращаться. При удержании кнопки двигатель начинает разгоняться, при отпускании — поддерживает обороты на том уровне, до которого успел разогнаться. При нажатии кнопки «Сброс» двигатель останавливается с выбегом. Кнопка «Реверс» задействуется только при остановленном двигателе.
Если проверка прошла успешно, то можете начинать изготавливать корпус и собирать в нем частотник. Не забудьте сделать в корпусе отверстия для притока холодного и оттока горячего воздуха от радиатора IGBT транзисторов.
Частотник для однофазного двигателя
 Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
Преобразователь частоты для однофазного двигателя отличается от трехфазного тем, что имеет на выходе две фазы (ошибки тут нет, двигатель однофазный, при подключении без частотника рабочая обмотка подключается в сеть напрямую, а пусковая — через конденсатор; но при использовании частотника пусковая обмотка подключается через вторую фазу) и одну нейтраль — в отличие от трех фаз у последнего, так что сделать частотник для однофазного электродвигателя, используя в качестве основы схему от трехфазного, не получится, поэтому придется начинать все сначала.
В качестве мозга этого преобразователя мы будем использовать МК ATmega328 с загрузчиком ардуины. В принципе, это и есть Arduino, только без своей обвязки. Так что, если у вас в закромах завалялась ардуинка с таким микроконтроллером, можете смело выпаивать его и использовать для дела, предварительно залив на него скетч (прошивку) из этого архива:
К атмеге будет подключен драйвер IR2132, а уже к нему — мосфеты IRG4BC30, к которым мы подключим двигатель мощностью до 1 КВт включительно.
Схема частотного преобразователя для однофазного двигателя:
Также для питания ардуины (5в) и для питания силового реле (12в), нам понадобятся 2 стабилизатора. Вот их схемы:
Стабилизатор на 12 вольт.
Стабилизатор на 5 вольт.
 Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Внимание! Эта схема не из простых. Возможно, придется настраивать и отлаживать прошивку для достижения полной работоспособности устройства, но это несложно, и мануалов по программированию Arduino в интернете — великое множество. К тому же сам скетч содержит довольно подробные комментарии к каждому действию. Но если для вас это слишком сложно, то вы можете попробовать найти такой частотник в магазине. Пусть они и не так распространены, как частотники для трехфазных двигателей, но купить их можно, пусть и не в каждом магазине.
Еще обратите внимание на то, что включать схему без балласта нельзя — сгорят выходные ключи. Балласт нужно подключать через диод, обращенный анодом к силовому фильтрующему конденсатору. Если подключите балласт без диода — опять выйдут из строя ключи.
Если вас все устраивает, можете приступать к изготовлению платы, а затем — к сборке всей схемы. Перед сборкой убедитесь в правильности разводки платы и отсутствии дефектов в ней, а также — в наличии у вас всех указанных на схеме радиодеталей. Также не забудьте установить IGBT-транзисторы на массивный радиатор и изолировать их от него путем использования термопрокладок и изолирующих шайб.
 После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
После сборки частотника можете приступать к его проверке. В идеале у вас должен получиться такой функционал: кнопка «S1» — пуск, каждое последующее нажатие добавляет определенное (изменяется путем редактирования скетча) количество оборотов; «S2» — то же самое, что и «S1», только заставляет двигатель вращаться в противоположном направлении; кнопка «S3» — стоп, при её нажатии двигатель останавливается с выбегом.
Обратите внимание, что реверс осуществляется через полную остановку двигателя, при попытке сменить направление вращения на работающем двигателе произойдет его мгновенная остановка, а силовые ключи сгорят от перегрузки. Если вам не жаль денег, которые придется потратить на замену мосфетов, то можете использовать эту особенность в качестве аварийного тормоза.
Возможные проблемы при проверке
Если при проверке частотника схема не заработала или заработала неправильно, значит, вы где-то допустили ошибку. Отключите частотник от сети и проверьте правильность установки компонентов, их исправность и отсутствие разрывов/замыканий дорожек там, где их быть не должно. После обнаружения неисправности устраните её и проверьте преобразователь снова. Если с этим все в порядке, приступайте к отладке прошивки.
Скалярный частотник для однофазного асинхронного двигателя
Начнём с того, что у каждого программера должен быть токарный станок. Ну… Или, как минимум, у меня он должен быть. И пусть даже без ЧПУ. Это моя мечта.
И мечта сбылась. Станок куплен, привезён, поставлен на место парковки и… Надо бы его включить. А включить его не так и просто. И если не искать простых путей, то нужен «частотник», а по-научному: преобразователь частоты. И пусть я в этом профан, но я его сделал.
И вот с подключения двигателя и начинаются интересности. Сам по себе я в таком профан, есть некоторые общие знания, но как оно реально работает — понятия не имел. А уж когда вместо ожидаемых 3-х выводов 3-х фазника я узрел 4, да ещё и не 3 обмотки с общей точкой, а отдельные 2, да ещё с разным сопротивлением… Ну, я, кхм, скажем так — «удивился».
Так вот, двигатели. Они бывают трёхфазные, трёхфазные, включенные треугольником через конденсаторы и… однофазные конденсаторные.
Трёхфазные — «полноценные» асинхронники. 3 обмотки, по-хорошему включённые звездой и повешенные на полноценные 3 фазы. Ну, или 3-х фазный частотник, коих валом на али.
Трёхфазные + треугольник + конденсаторы. Тут мы уже теряем в КПД, мощности и моменте, ну да если 3-х фаз нету, то вполне себе решение. Дёшево, просто, надёжно, сердито.
Однофазные конденсаторные
Вот о них то и пойдёт речь. Вообще, такие двигатели очень распространены. Это и вентиляторы моторчиков проекторов и приводы некоторых часов, и моторчики для маленьких наждаков и остальные применения, где не надо большой мощности, но нужны плюсы асинхронников: огромная надёжность + обороты, зависящие только от частоты питающего напряжения.
Базовая схема включения (картинка не моя, честно найденная на просторах интернета):
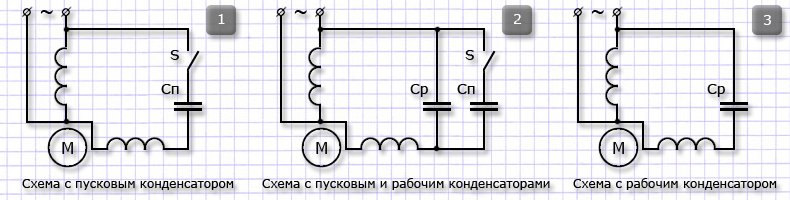
В общем, грубо, принцип такой: Есть стартерная обмотка, она наводит ЭДС в короткозамкнутом роторе. Со смещением по фазе включается рабочая обмотка. Она «отталкивает» замагниченный якорь, начинается вращение. При повороте на некий угол, всё повторяется. Мотор начинает крутиться.
Итого — нужно 2 фазы, смещённые на некий угол. Обычно это 90 градусов. Это и обеспечивается пусковым конденсатором. Ну а после набора оборотов — якорь начинает работать от самой же рабочей обмотки и стартерную обмотку можно вообще даже отключить. Ну, или запитать от рабочего конденсатора, существенно меньшей ёмкости.
Но это всё теория. А на практике то чего хочется? Хочется частотник. Что б само разгонялось, тормозило, крутилось в обе стороны, ну и с разными оборотами, конечно! И вот тут становится всё несколько сложнее. Дело в том, что таких частотников в продаже в разы меньше. И стоят они в разы больше. В общем — экзотика.
А ведь, если так задуматься, то разница от 3-х фазного не так и велика. И даже можно использовать ту же схемотехнику. При этом, есть те же 3 отвода: общий, стартерная обмотка, рабочая обмотка. И всё дело в прошивке. А значит — это можно сделать. И пусть это будет не векторное управление с кучей математики, а простое скалярное, но… как умею.
Итак — что требуется. Для начала посмотрим на графики синуса и косинуса (у нас же смещение 90 градусов) УСЛОВНО оно будет выглядеть так:
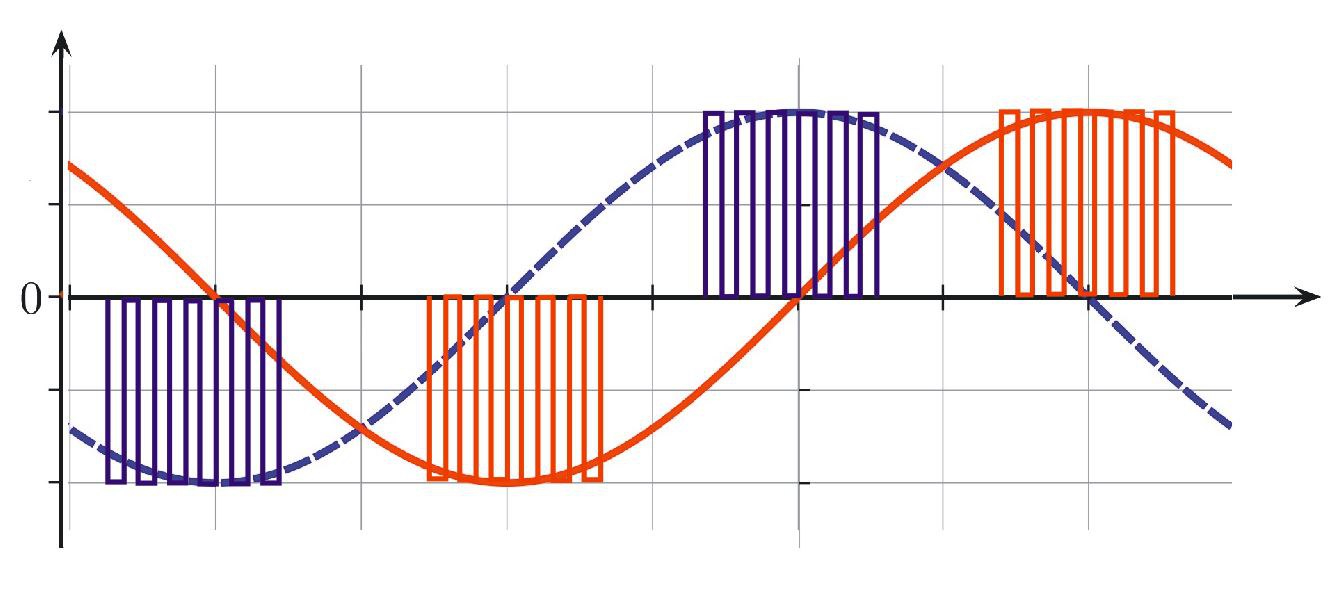
Т.е. задача элементарна: «притягиваем» к земле общий, подаём пачку положительных импульсов в стартерную обмотку, подаём пачку импульсов в рабочую. Затем подтягиваем общий к плюсу и подаём пачку отрицательных импульсов к стартерной, а затем и рабочей обмотке. Т.о. грубо получаем имитацию смены полярности и сдвиг фаз. От того, как часто мы это будем делать — будет зависеть «частота».
В общем — теория проста. В качестве контроллера ATMega 328 с бутлоадером ардуины (да по сути, сама ардуина, просто без лишней обвязки), в качестве драйвера IR2132 (старая, но с IR2136 не сложилось) и выходные ключи IRG4BC30. Дя моего 1.1КВт-го мотора этого более чем достаточно.
(Если повторять схему, то просто делается плата, в Arduino Duemilanove заливается скетч, затем Mega328 выдёргивается и впаивается в плату. Готово.)
А вот дальше… Дальше я погрузился в удивительный мир индуктивностей и силовой электроники. И всё оказалось не так и просто, как думалось вначале:
1. Скорость открытия и закрытия ключей — это важно. Deadtime — это ОЧЕНЬ важно.
2. Включение балласта — обязательно с использованием диода, обращённого плюсом на силовой фильтрующий конденсатор. Иначе выбросы при снятии нагрузки с индуктивности на раз выводят из строя силовые IGBT.
3. Охлаждение. На плате маленькие радиаторы — плохо. Либо перегреется, либо надо обдувать. Но если обдувать, то вся металлическая взвесь от станка, рано или поздно, закоротит что-то и будет бах.
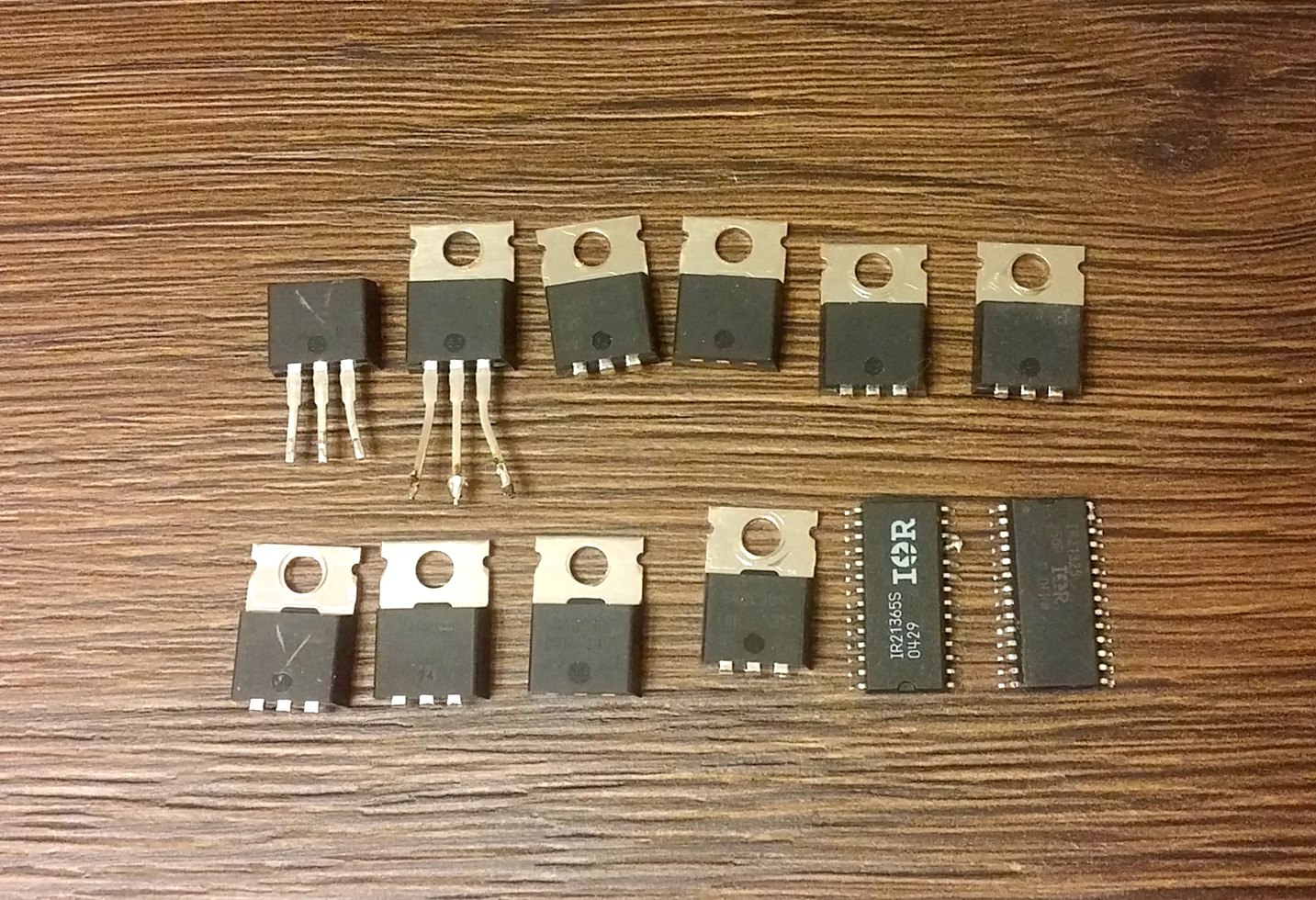
3+. Слюда, а точнее ОЧЕНЬ ТОНКАЯ слюда, это плохо. Она пробивается и получается то, что в заглавии статьи. В то же время силиконовые термопрокладки хуже по теплопроводности. Ну а керамика… У меня её нет.
4. Торможение методом длинной пачки импульсов одной полярности на одну обмотку, быстро перегревает транзисторы и они сгорают. А так же, очень весело прыгает мотор, раскрученный до 3-х тыс оборотов и остановленный за 0.3 сек до 0.
5. Когда у вас всё заработает и вы расслабитесь, включите схему без балласта и нажмёте пуск — будет бах. Это приводит ещё и к замене драйвера.
Скетч: Сейчас реализовано вращение в обе стороны с плавной перестройкой частоты 25-75Гц с шагом 0.25. Была идея с тормозом. Сейчас закомментировано и надо будет менять схему. А именно, идея такая: я правильно подавал импульсы одной полярности, НО. Это надо делать через балластное сопротивление отдельным ключом.
Силовая часть: схема ещё будет дорабатываться, но на данный момент станок стоит в не отапливаемом помещении и работать с ним крайне сложно из-за замерзания масла.
Схема: 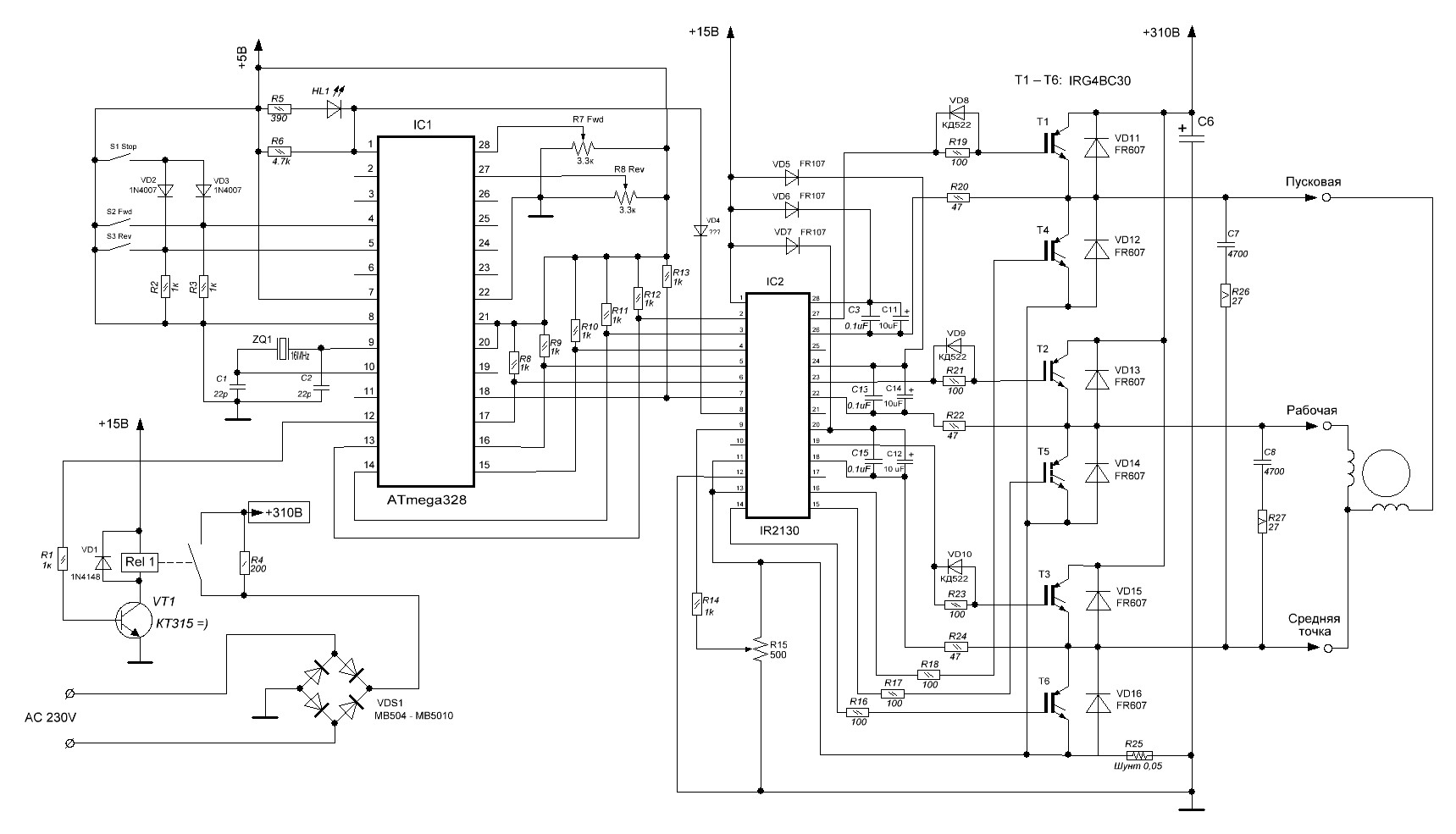
В общем-то почти классик, но собранная из 5-и разных схем. Диоды по «высоким» плечам в общем-то при применении IGBT транзисторов и не обязательны, но я сначала сделал, а потом только подумал
В итоге: оно работает. Многое ещё стоит доделать, например выносной «пультик», тормоз. Может стоит поэкспериментировать с длительностью импульсов или сделать таки полноценный ШИМ имитирующий синус, а не постоянную скважность. Но пока это так. Может кому пригодится.
И в окончание, хотелось бы спросить: вместо балласта я поставил дроссель, «зажатый» диодами. На сколько я не прав в таком решении? Дроссель, я даже не знаю какой индуктивности. Взят из БП ATX, где он стоял в блоке компенсации реактивной мощности.
Ну а опыт… Опыт очень интересный. Я никогда б не подумал что это может быть столь сложно. И что 30В и 300В это огромная разница. Очень зауважал людей, которые такие вещи проектируют.
А это цена моих ошибок:
Видео всего процесса можно посмотреть тут: 1 2 3
Вопросы более знающим, ответы хотелось бы в комментариях:
1. Дроссель что стоит по цепи +310. Стоит ли мне от него избавляться? Я поставил его в надежде что нарастание тока, в случае сквозного тока, будет медленней и драйвер успеет уйти в защиту по току.
2. У меня получаются импульсы одинаковой скважности. Критически ли это важно? Оставить, или всё ж таки делать нечто «синусозависимое» по скважности?
